dogleg算法解析
之前有仔细介绍过非线性优化,其中二阶梯度的方法有高斯牛顿法、LM算法、dogleg算法等。前段时间仔细研究了dogleg算法的实现步骤,今天抽出时间总结一下。
dogleg属于二阶梯度法,为了解决高斯牛顿法在使用一阶导数平方近似计算hessian矩阵时可能不准确的问题,它结合了高斯牛顿法与最速下降法,通过定义近似半径来限制近似的可执行范围。本质上与LM算法类似,不过实现细节大有不同。
算法
dogleg的思想很简单,对于一个非线性优化问题,它的每次的迭代步骤可以归纳如下:
首先计算当前其高斯牛顿方法的迭代步长\(H_{gn}\),然后计算最速下降法的迭代步长\(H_{sd}\)。
根据第一步中确定的\(H_{gn}\)与\(H_{sd}\)相对与当前信赖域半径\(r\)的大小确定本次dogleg更新的步长\(\delta\);
使用第二步中确定的更新步长进行更新,然后计算\(\rho\)(与LM中相同),根据其大小判断是否执行本次迭代与如何更新信赖域半径\(r\)。
第一步
第一步是计算高斯牛顿与最速下降两种方法的更新步长。
- 高斯牛顿法步长\(H_{gn}\)可以通过求解如下方程组得到(推导可见非线性优化)
\[\left(\mathbf{J}(\mathbf{x})^{\top} \mathbf{J}(\mathbf{x})\right) \mathbf{h}_{\mathrm{gn}}=-\mathbf{J}(\mathbf{x})^{\top} \mathbf{f}(\mathbf{x}) \]
- 最速下降法步长\(H_{sd}\),获得可以分为两步来获得
- 第一步是先获得最速下降的方向
- 第二步是确定最速下降的步长
- 最后综合方向与步长即可得到更新的向量
首先,最速下降法的方向即是梯度反方向,先不考虑模长,我们可以使用下面公式表示(其中g表示梯度方向)
\[ \mathbf{h}_{\mathrm{sd}} = -\mathbf{g} = -\mathbf{J}(\mathbf{x})^{\top} \mathbf{f}(\mathbf{x}) \]
然后我们知道利用雅克比矩阵可以得到下面模型:
\[ \begin{aligned} \mathbf{f}\left(\mathbf{x}+\alpha \mathbf{h}_{\mathrm{sd}}\right) & \simeq \mathbf{f}(\mathbf{x})+\alpha \mathbf{J}(\mathbf{x}) \mathbf{h}_{\mathrm{sd}} \\ F\left(\mathbf{x}+\alpha \mathbf{h}_{\mathrm{sd}}\right) & \simeq \frac{1}{2}\left\|\mathbf{f}(\mathbf{x})+\alpha \mathbf{J}(\mathbf{x}) \mathbf{h}_{\mathrm{sd}}\right\|^{2} \\ &=F(\mathbf{x})+\alpha \mathbf{h}_{\mathrm{sd}}^{\top} \mathbf{J}(\mathbf{x})^{\top} \mathbf{f}(\mathbf{x})+\frac{1}{2} \alpha^{2}\left\|\mathbf{J}(\mathbf{x}) \mathbf{h}_{\mathrm{sd}}\right\|^{2} \end{aligned} \]
我们对上述模型求最小值(对\(\alpha\)求导并另导数为0),此时\[\alpha\]应取值为:
\[ \alpha=-\frac{\mathbf{h}_{\mathrm{sd}}^{\top} \mathbf{J}(\mathbf{x})^{\top} \mathbf{f}(\mathbf{x})}{\left\|\mathbf{J}(\mathbf{x}) \mathbf{h}_{\mathrm{sd}}\right\|^{2}}=\frac{\|\mathbf{g}\|^{2}}{\|\mathbf{J}(\mathbf{x}) \mathbf{g}\|^{2}} \]
所以,最后最速下降法的更新向量为
\[ \mathbf{h}_{\mathrm{sd}} = \alpha \mathbf{h}_{\mathrm{sd}} \]
第二步
通过当前的信赖域半径与上一步计算的两种步长结合计算处dogleg算法的更新步长更新规则如下:
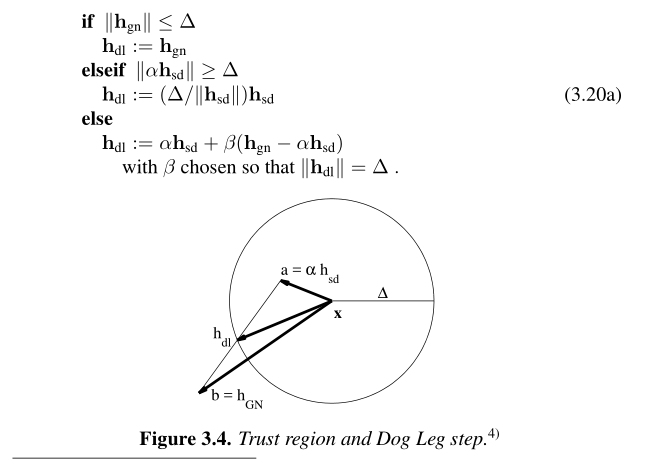
上图中的更新规则描述的较为清楚,但是代码实现尚有难度,主要是\(\beta\)的值较难确定。我在网上看到了一个更加明确的规则,将上述更新规则总结为一个统一的表达式。
\[ h_{dl}=\left\{\begin{array}{ll}{\tau h_{sd},} & {0 \leq \tau \leq 1} \\ {h_{sd}+(\tau-1)\left(h_{gn}-h_{sd}\right),} & {1 \leq \tau \leq 2}\end{array}\right. \]
可以发现dogleg的更新向量是在最速下降法与高斯牛顿法之间变换,并且最终的更新向量会小于等于信赖域半径。
其中比较关键的是变量\(\tau\)的确定,我直接贴出代码(其中delta_
\(\delta\)是信赖区域的半径大小)
1
2
3
4
5
6
7
8
9
10
double tau;
if(H_gn.norm() <= delta_)
tau = 2;
else if(H_sd.norm() >= delta_)
tau = delta_ / H_sd.norm() ;
else{
VecX tmp = H_gn - H_sd ;
tau = (- H_sd.transpose() * tmp + sqrt(pow((H_sd.transpose() * tmp),2) - tmp.squaredNorm() * (H_sd.squaredNorm() - pow(delta_,2)))) / tmp.squaredNorm() ;
tau += 1;
}
1 | |
第三步
判断改更新是否执行,并更新信赖域半径,此处的迭代策略比较简单,我是看的参考文献第一篇提供的策略,直接贴代码了。
注意此处有个\(\rho\)的计算,其值为
\[ \rho=\frac{F(\mathbf{x})-F\left(\mathbf{x}+\Delta \mathbf{x}_{\operatorname{dl}}\right)}{L(\mathbf{0})-L\left(\Delta \mathbf{x}_{\mathrm{dl}}\right)} \]
其中分母是此次更新后真实目标函数损失减少的量,分子是使用近似模型此次更新后目标函数损失应该减少的量。其中\(L(h)\)函数是如下线性函数模型
\[L(\mathbf{h}) = \frac{1}{2}\|\mathbf{f}(\mathbf{x})+\mathbf{J}(\mathbf{x}) \mathbf{h}\|^{2}\]
1 | |
实现
对于dogleg算法基于eigen实现了一般版本,下面是其应用于曲线拟合的实例。
参考文献
[1] METHODS FOR NON-LINEAR LEAST SOUARES PROBLEMS. K.Madsen, H.B.Nielsen, O.Tingleff
[2] Is Levenberg-Marquardt the Most Efficient Optimization Algorithm for Implementing Bundle Adjustment. Manolis I.A.